HK330 کمپیوٹر CNC پینل دیکھا
پروڈکٹ ویڈیو
کمپیوٹر CNC پینل نے HK330 دیکھا
1. ان پٹ پلیٹ کی چوڑائی کے مطابق، مطلوبہ پلیٹ کو کاٹیں اور جلدی سے اصل کام کرنے والی حالت میں واپس آجائیں۔
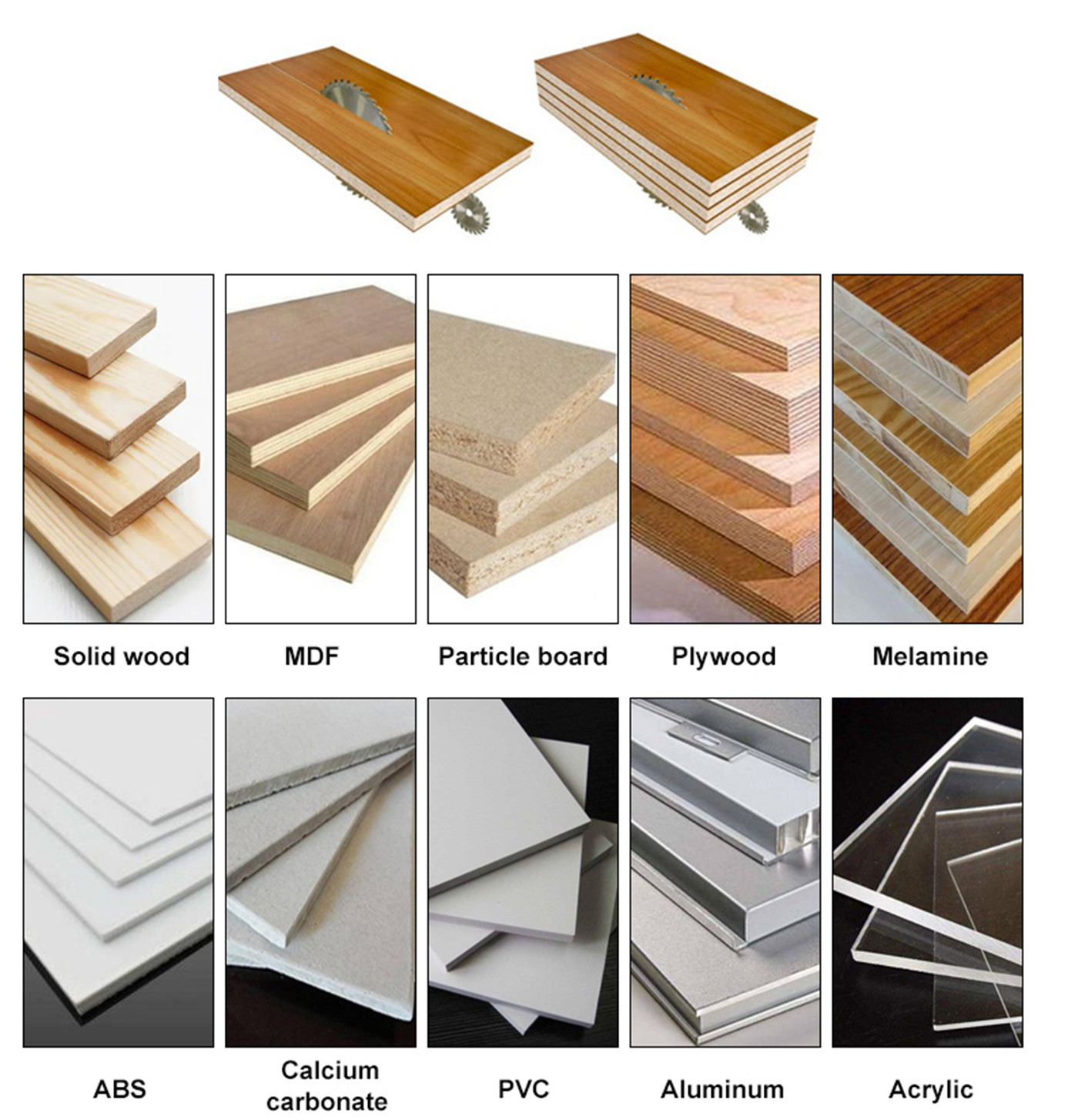
2. کاٹنے کی رفتار فریکوئنسی کنورٹر کے ذریعہ کنٹرول کی جاتی ہے، جو مختلف موٹائی اور مختلف مواد کی پلیٹوں پر قابو پا سکتی ہے۔
3. فیڈنگ نیومیٹک فلوٹنگ مالا کی میز کو اپناتا ہے، اور بھاری پلیٹ مواد کو تبدیل کرنا آسان ہے. روبوٹ خود بخود فیڈ کرتا ہے، کم محنت کی شدت اور اعلی پیداوار کی کارکردگی ہے.
4. مصنوعی غلطی کو ختم کرنے اور جہتی درستگی کو بہتر بنانے کے لیے درآمد شدہ ڈیلٹا سروو موٹر کا استعمال کریں۔
تکنیکی پیرامیٹرز
| HK330 | پیرامیٹر |
| زیادہ سے زیادہ کاٹنے کی رفتار | 0-80m/منٹ |
| زیادہ سے زیادہ کیریئر زیادہ سے زیادہ رفتار | 100m/min |
| مین سو موٹر پاور | 16.5 کلو واٹ (اختیاری 18.5 کلو واٹ) |
| کل پاور | 26.5kw (اختیاری28.5kw) |
| زیادہ سے زیادہ کام کرنے کا سائز | 3300L*3300W*100H(mm) اختیاری 120H(mm) |
| کم از کم ورکنگ سائز | 34L*45W(mm) |
| مجموعی سائز | 5300L*5950W*1900H(mm) |

بڑی پلیٹ پروسیسنگ کی ضروریات کو پورا کریں، جس میں زیادہ سے زیادہ 2800 * 2800 ملی میٹر اور 105 ملی میٹر کی موٹائی اور وسیع تر قابل اطلاق ہے۔

سروو مکینیکل کلیمپ ہینڈ 11 واحد سب سے بڑا ڈیزائن مکینیکل کلپ

روبوٹک بازو ± 0.1 ملی میٹر کی کٹنگ درستگی کے ساتھ اعلی درستگی والے ورم گیئر ریڈوسر اور فیڈنگ گیئر ریک کو اپناتا ہے۔
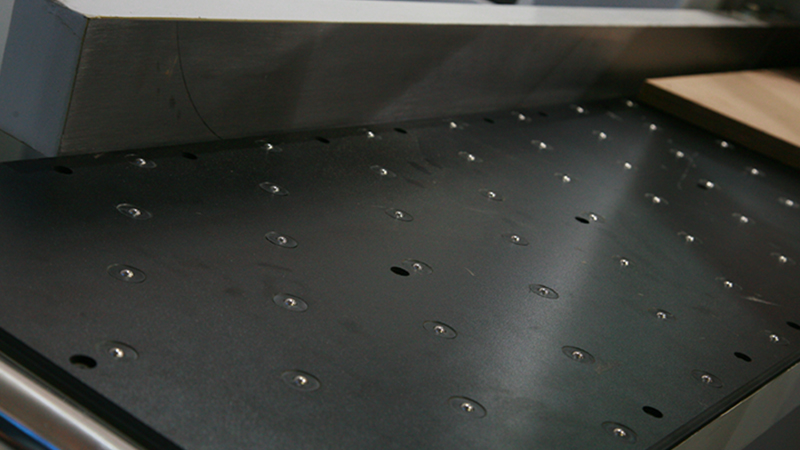
ورک ٹیبل نیومیٹک فلوٹنگ پلیٹ فارم سے بنی ہے۔ اس کے پینلز کو منتقل کرنا بہت آسان ہے۔
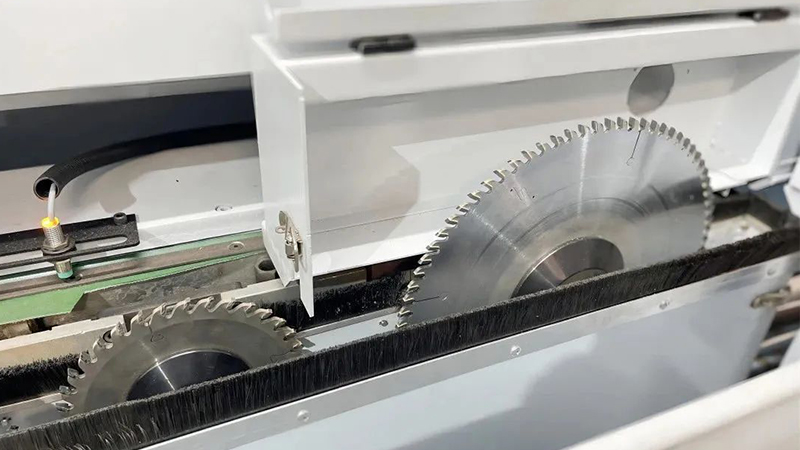
اسکورنگ آری کو آری کی ضروریات کے مطابق خود بخود تبدیل کیا جاسکتا ہے۔ اعلی معیار کی آری کے لئے مین آر کے ساتھ تعاون کریں۔
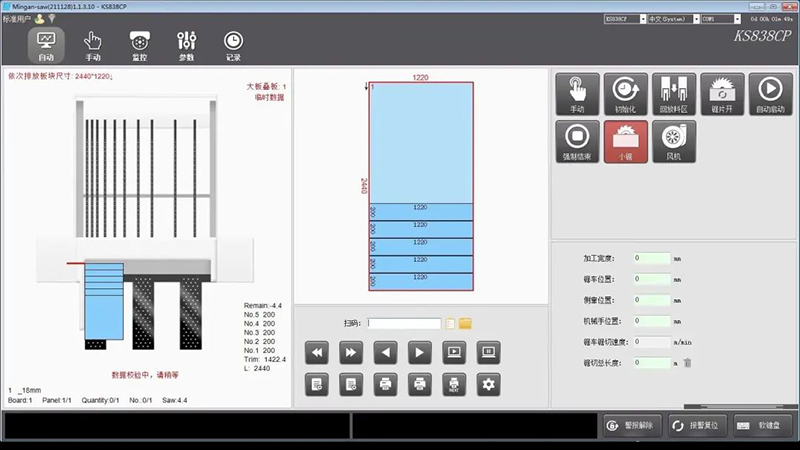
مواد کی ترتیب کی خودکار اصلاح کے لیے اختیاری اصلاحی سافٹ ویئر اور
نمونہ